#include "Halide.h"
#include "halide_image_io.h"
using namespace Halide;
using namespace Halide::Tools;
int main() {
Var x("x"), y("y"), c("c");
// 读输入图像
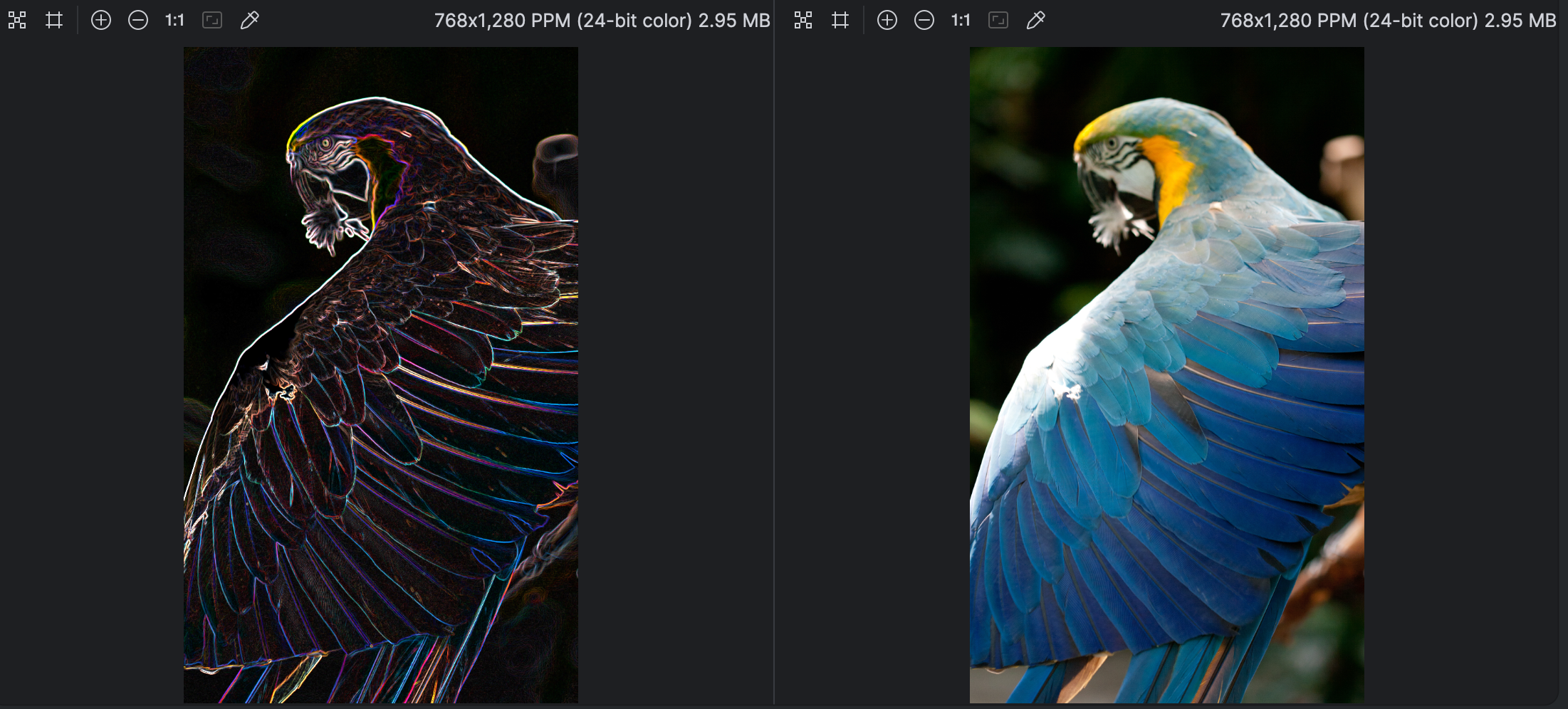
Buffer<uint8_t> input = load_image("images/rgb.png");
// 边界处理,避免越界
Func clamped = BoundaryConditions::repeat_edge(input);
// 转 float
Func in_f("in_f");
in_f(x, y, c) = cast<float>(clamped(x, y, c));
// ---------- Stage 1: Gaussian blur ----------
// 1D 核 [1, 2, 1]
Buffer<float> gk(3);
gk(0) = 1.0f; gk(1) = 2.0f; gk(2) = 1.0f;
RDom rx(-1, 3), ry(-1, 3);
Func blur_x("blur_x");
blur_x(x, y, c) = 0.0f;
blur_x(x, y, c) += in_f(x + rx, y, c) * gk(rx + 1);
Func blur_y("blur_y");
blur_y(x, y, c) = 0.0f;
blur_y(x, y, c) += blur_x(x, y + ry, c) * gk(ry + 1);
// 1-2-1 * 1-2-1 总权重 = 16
Func gauss("gauss");
gauss(x, y, c) = blur_y(x, y, c) / 16.0f;
// ---------- Stage 2: Sobel on blurred image ----------
// Sobel kernels
Buffer<float> Kx(3, 3), Ky(3, 3);
// Gx
Kx(0,0) = -1; Kx(1,0) = 0; Kx(2,0) = 1;
Kx(0,1) = -2; Kx(1,1) = 0; Kx(2,1) = 2;
Kx(0,2) = -1; Kx(1,2) = 0; Kx(2,2) = 1;
// Gy
Ky(0,0) = -1; Ky(1,0) = -2; Ky(2,0) = -1;
Ky(0,1) = 0; Ky(1,1) = 0; Ky(2,1) = 0;
Ky(0,2) = 1; Ky(1,2) = 2; Ky(2,2) = 1;
RDom k(0, 3, 0, 3);
Func Gx("Gx"), Gy("Gy");
Gx(x, y, c) = 0.0f;
Gy(x, y, c) = 0.0f;
// 在高斯模糊后的图上做 Sobel
Gx(x, y, c) += gauss(x + k.x - 1, y + k.y - 1, c) * Kx(k.x, k.y);
Gy(x, y, c) += gauss(x + k.x - 1, y + k.y - 1, c) * Ky(k.x, k.y);
// 梯度幅值
Func mag("mag");
mag(x, y, c) = sqrt(Gx(x, y, c)*Gx(x, y, c) +
Gy(x, y, c)*Gy(x, y, c));
Func output("output");
output(x, y, c) = cast<uint8_t>(clamp(mag(x, y, c), 0.0f, 255.0f));
// 可以先不写 schedule,直接 realize 一下
Buffer<uint8_t> result =
output.realize({input.width(), input.height(), input.channels()});
save_image(result, "gauss_sobel.png");
return 0;
}